Available Robots#
This page lists the manipulators and grippers available by default in DexSuite.
Use these keys with ds.make(...):
manipulator="<key>"selects a manipulator model.gripper="<key>"selects a gripper model (for modular manipulators).
Name (Key) |
Image |
Notes |
DoF |
|---|---|---|---|
|
|
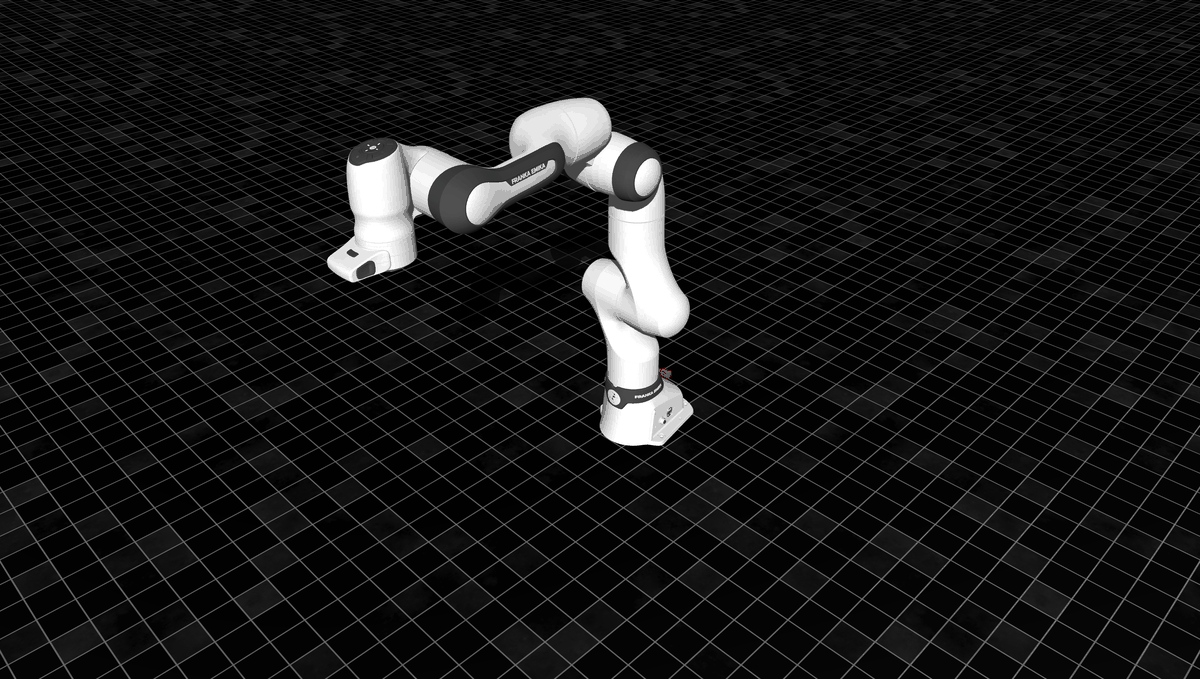
Franka Emika Panda arm (requires a separate gripper). |
7 |
|
|
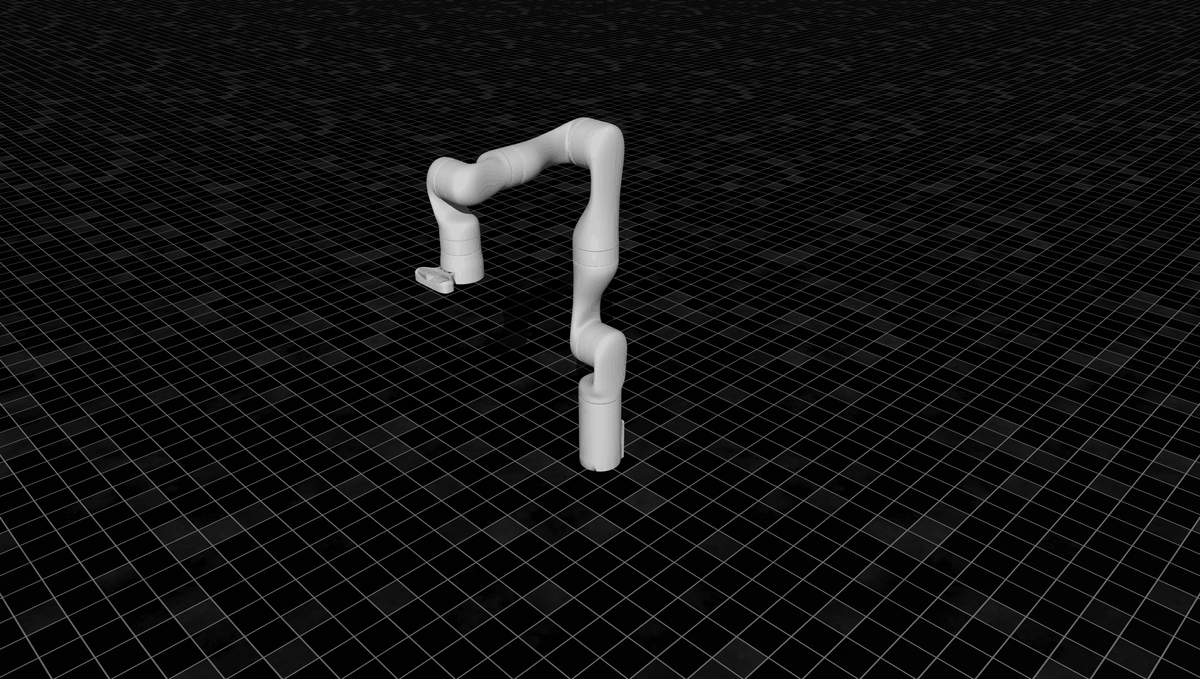
Franka Emika FR3 arm (requires a separate gripper). |
7 |
|
|
Kinova Gen3 arm (requires a separate gripper). |
7 |
|
|
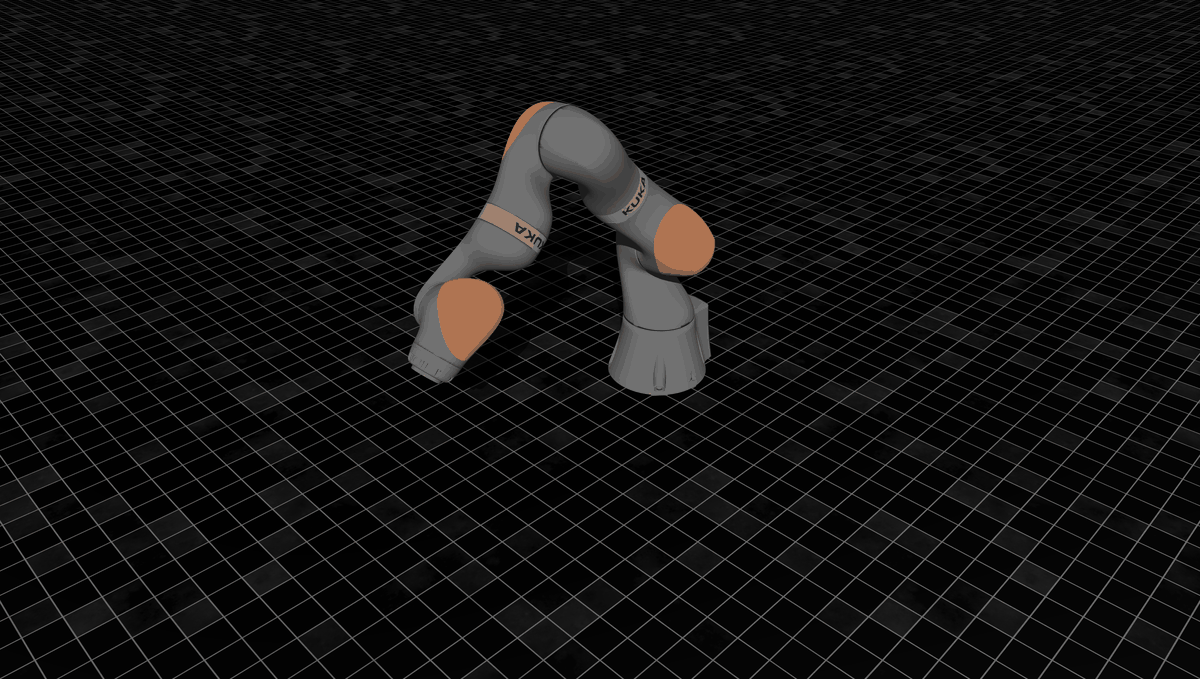
Kuka LBR iiwa 14 arm (requires a separate gripper). |
7 |
|

|
Link6 arm (requires a separate gripper). |
6 |
|
|
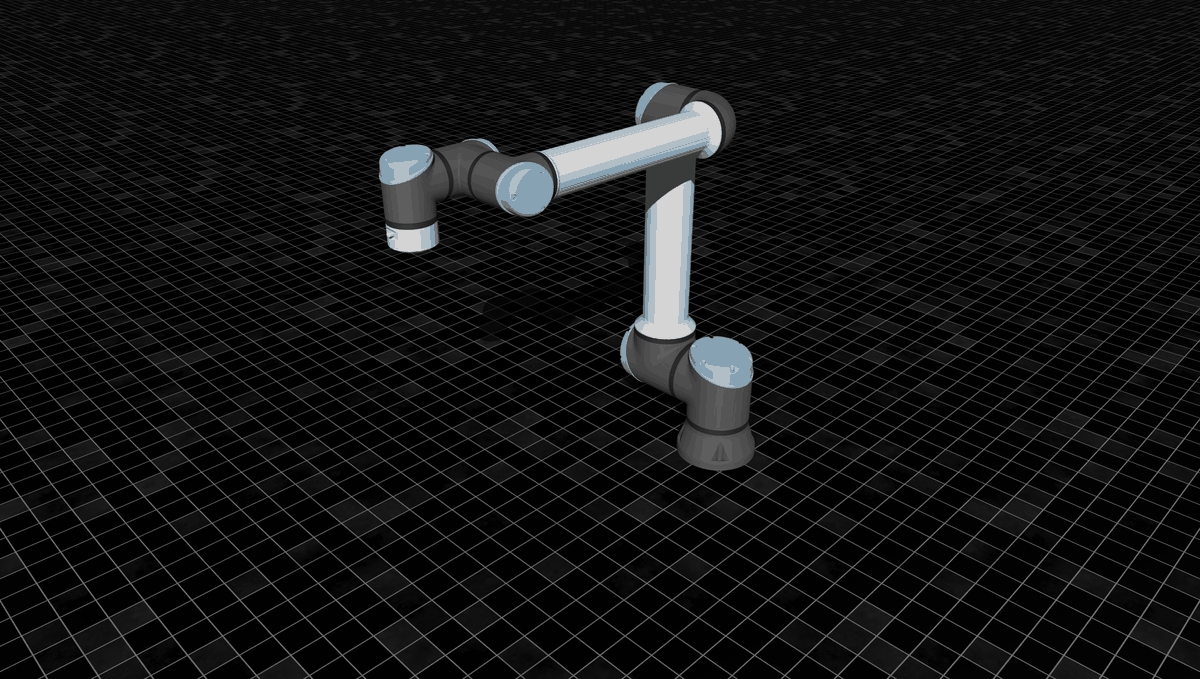
Universal Robots UR10e arm (requires a separate gripper). |
6 |
|
|
Universal Robots UR5e arm (requires a separate gripper). |
6 |
Name (Key) |
Image |
Notes |
DoF |
|---|---|---|---|
|
|
Franka Panda with built-in parallel gripper. |
9 |
|
|
Kinova Gen3 Lite with built-in gripper. |
7 |
|
|
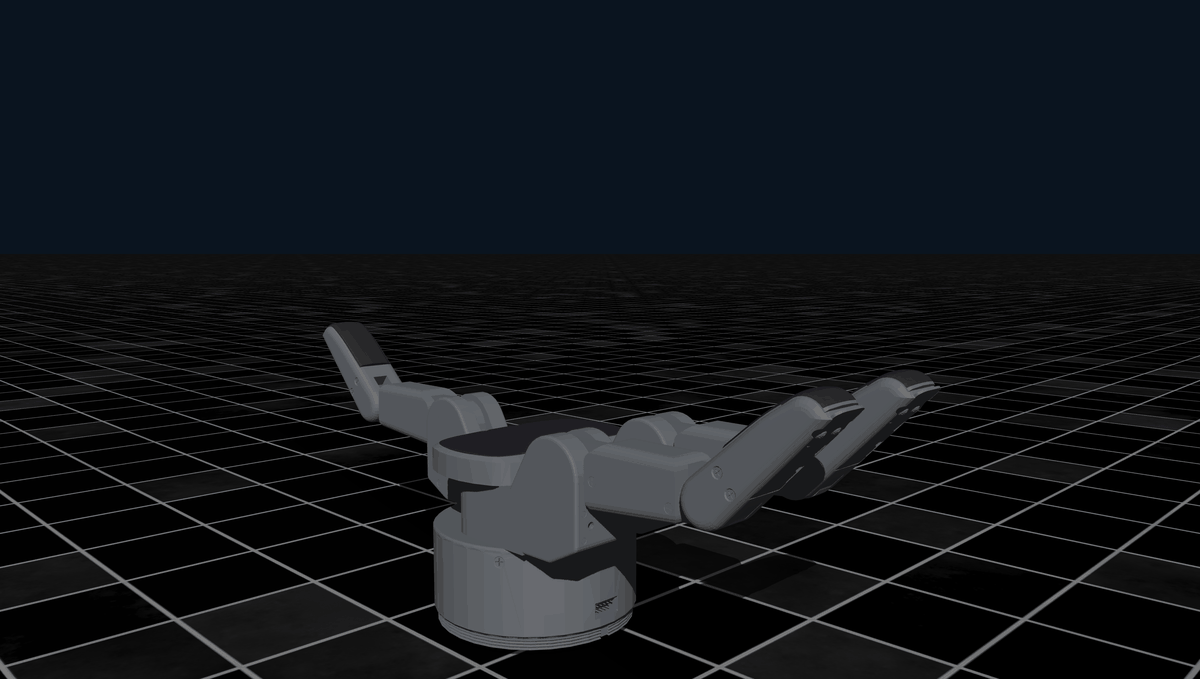
SO Arm 100 with rotary single-jaw gripper. |
6 |
|
|
Trossen WX250S with built-in gripper. |
7 |
|
|
Trossen VX300S with built-in gripper. |
7 |
Name (Key) |
Image |
Notes |
DoF |
|---|---|---|---|
|
|
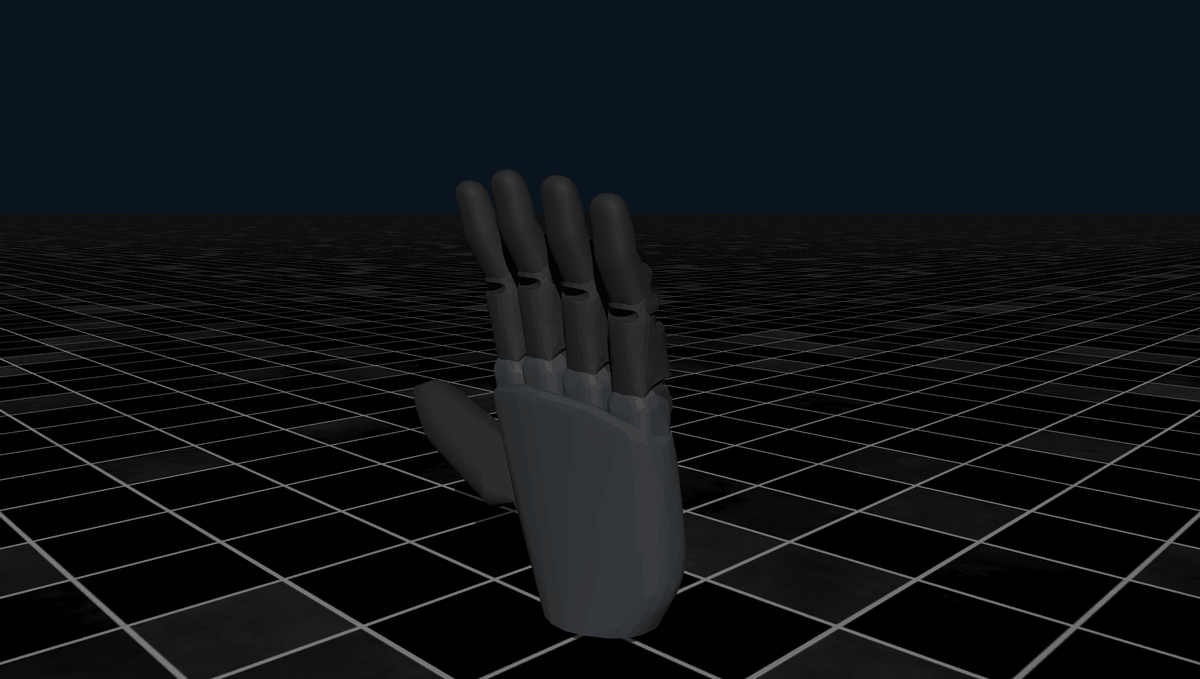
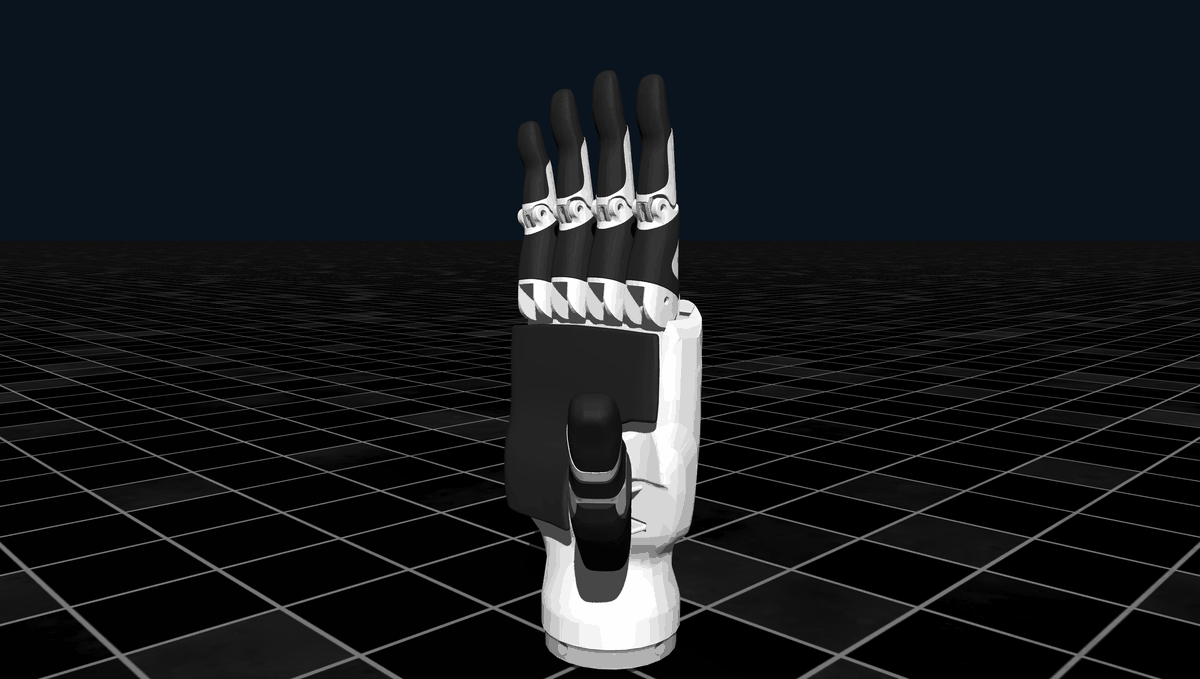
Ability hand gripper. |
6 |
|
|
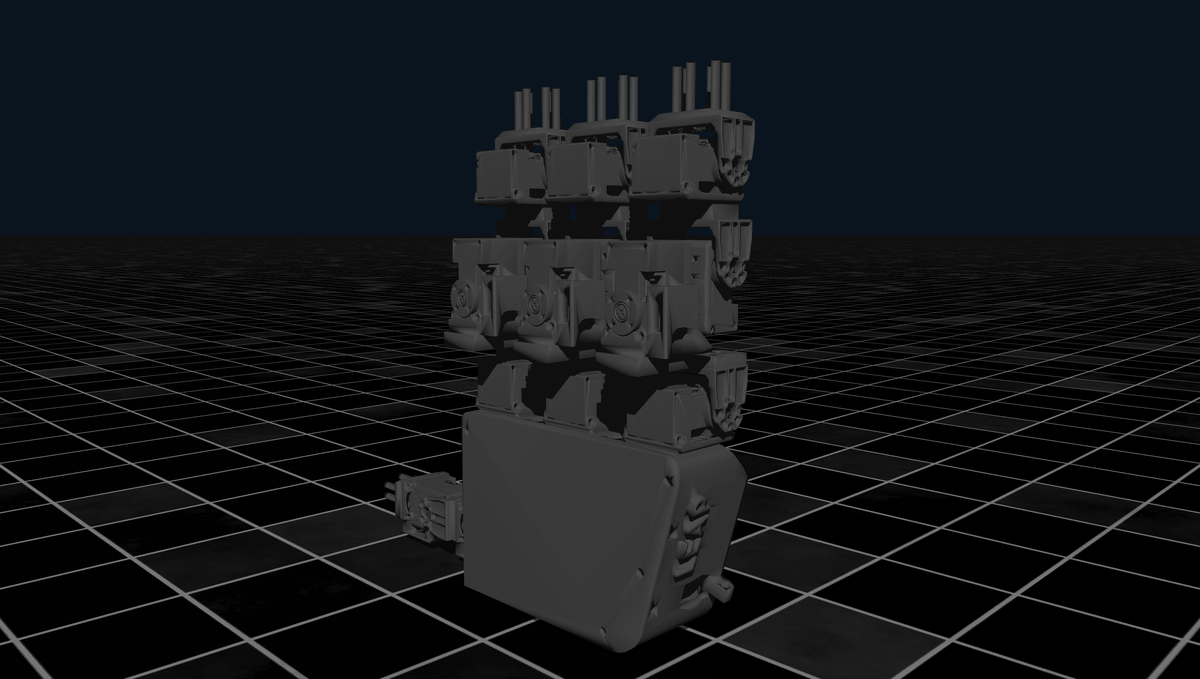
Allegro hand gripper (right by default). |
16 |
|
|
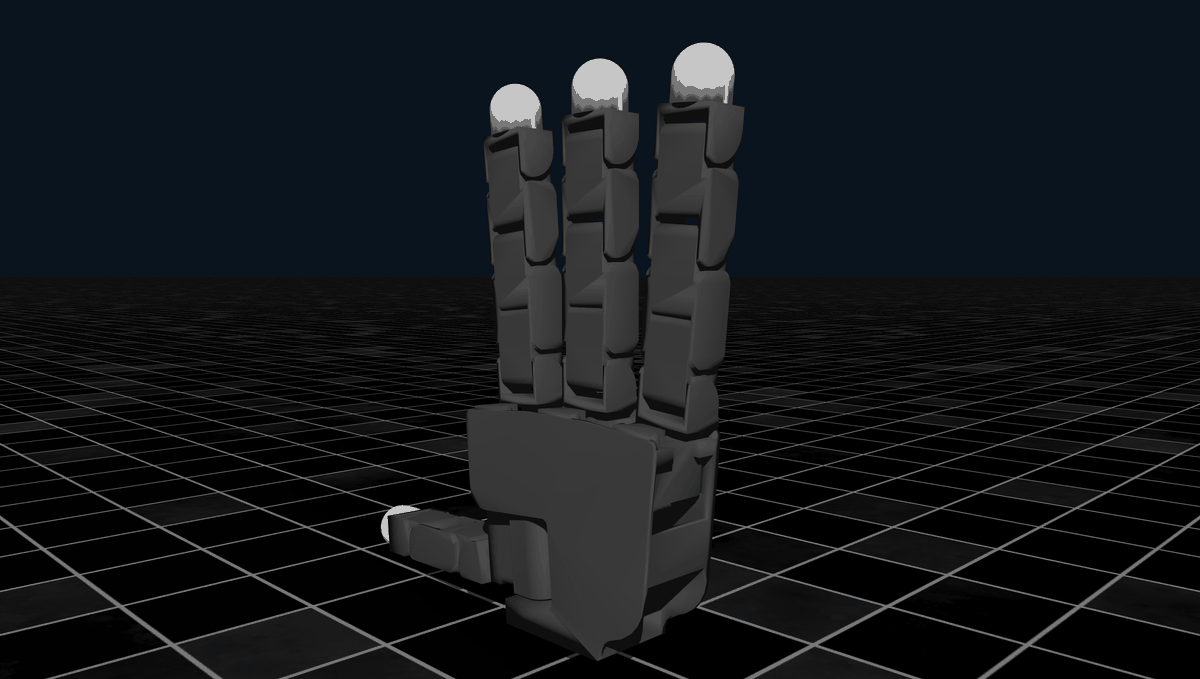
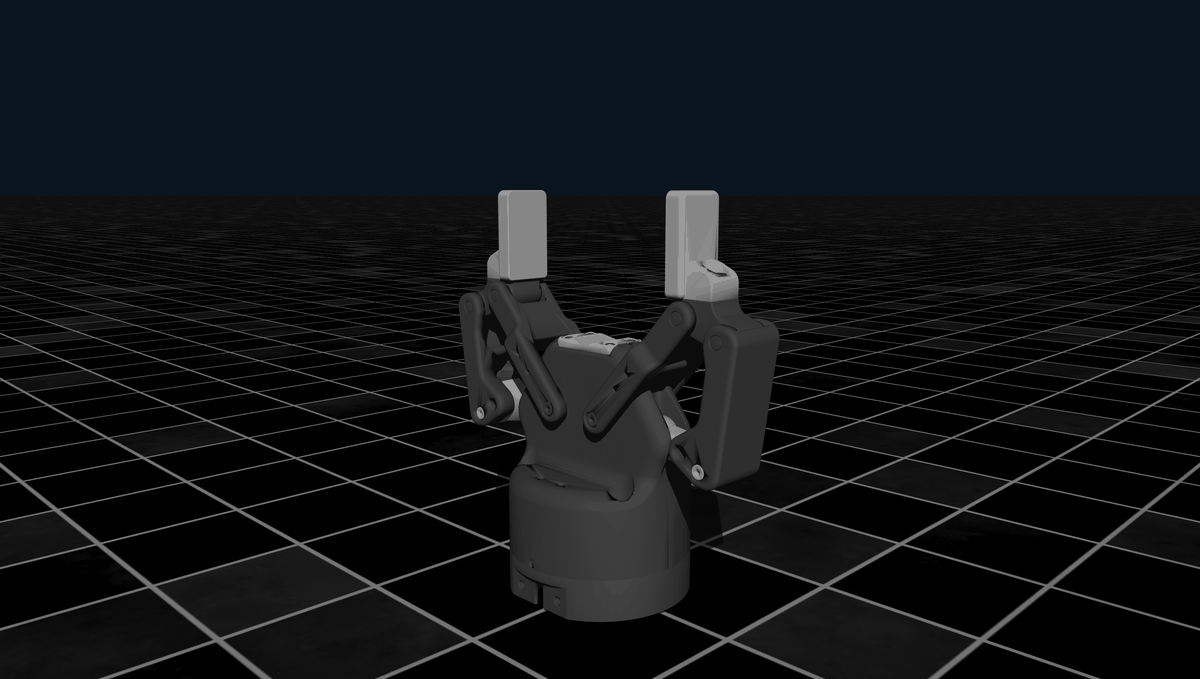
Barrett hand gripper. |
8 |
|
|
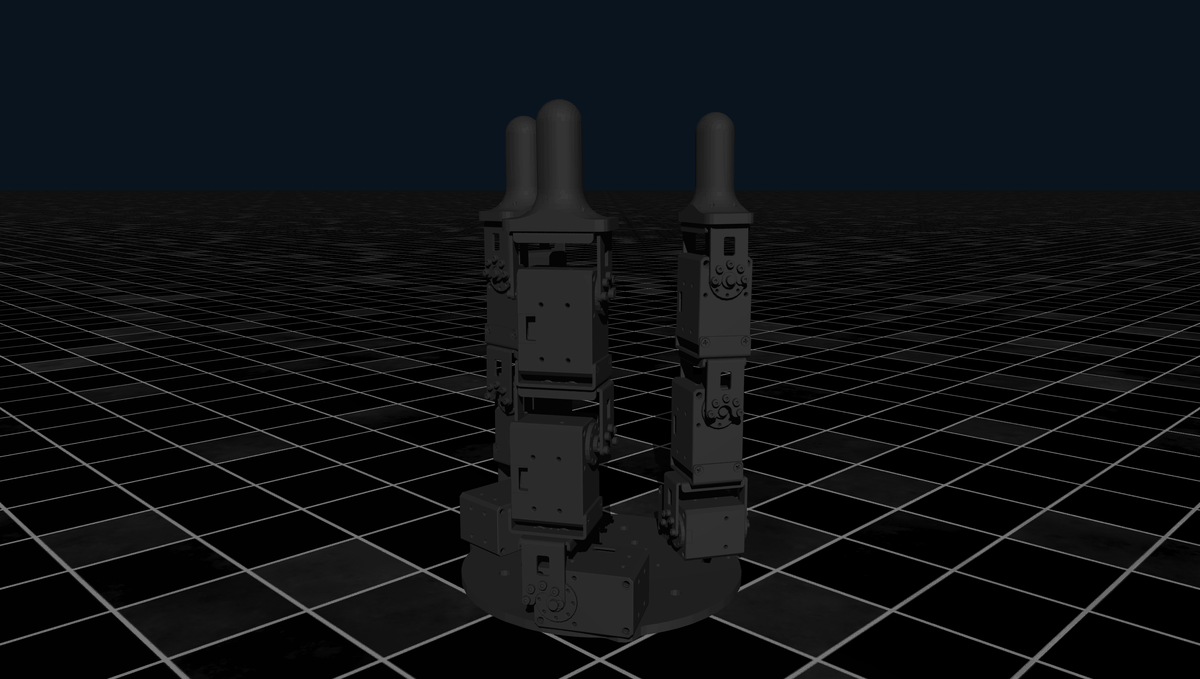
D claw gripper. |
9 |
|
|
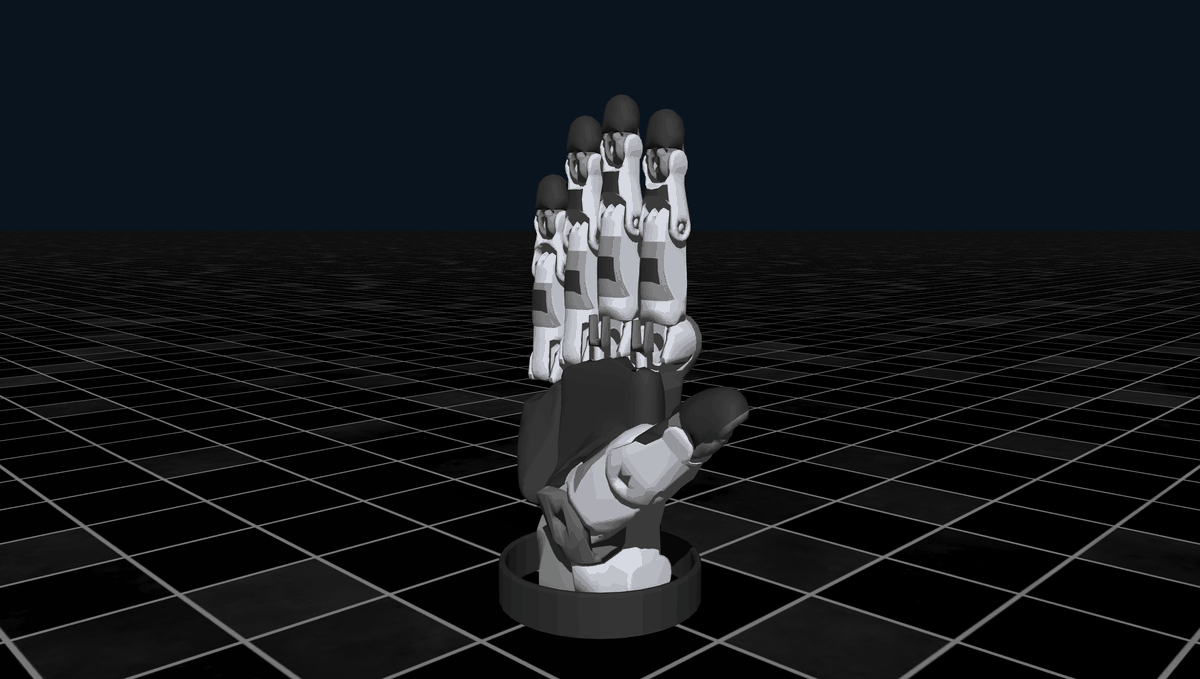
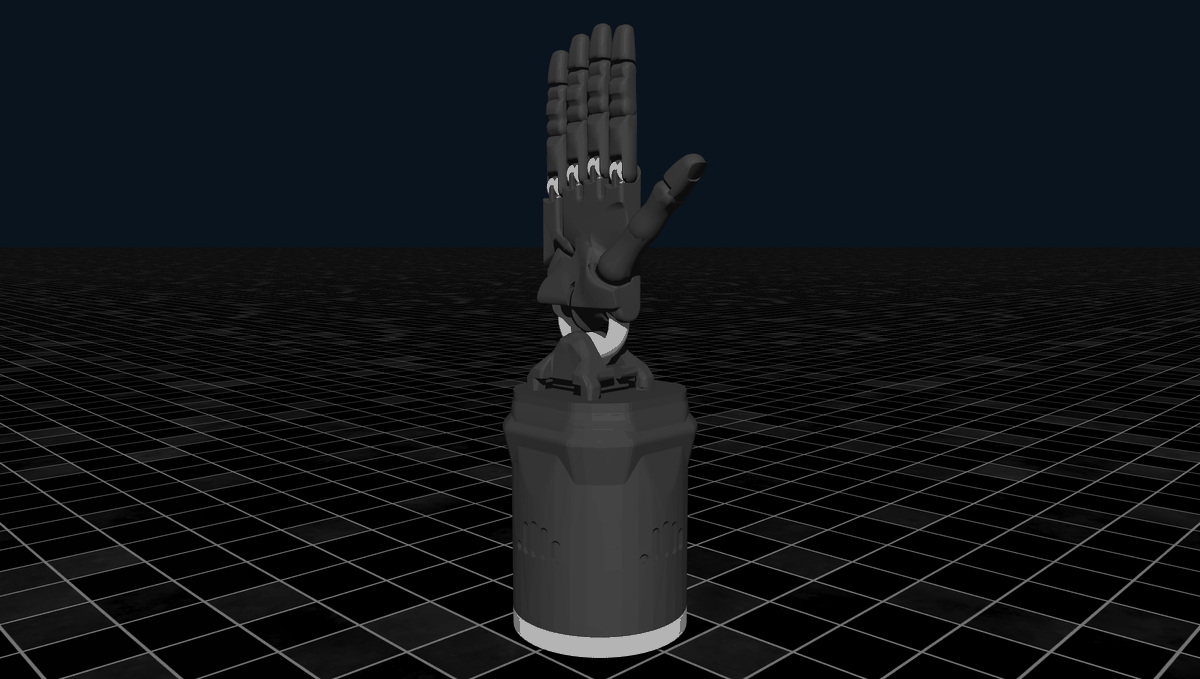
Inspire right hand gripper. |
6 |
|
|
Leap hand gripper (right by default). |
16 |
|
|
Robotiq 2F-85 parallel gripper. |
1 |
|
|
Schunk SVH right hand gripper. |
9 |
|
|
Shadow Hand gripper (right by default). |
24 |
|
|
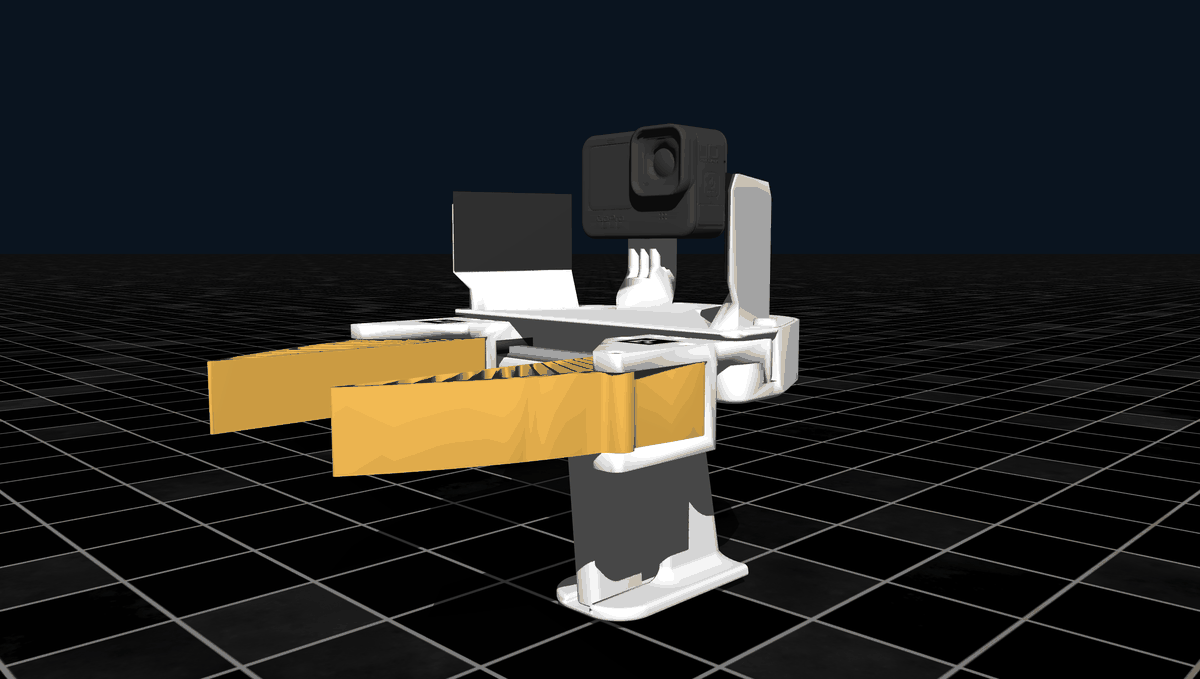
Umi gripper. |
1 |
Handed Variants#
Some grippers provide explicit left/right keys:
allegro_left/allegro_rightleap_left/leap_rightshadow_left/shadow_right